بدون سیستم های پایش سلامت قابل اعتماد برای آنالیز ارتعاشات فعال و محافظت از سلامت ماشین های آبی، تولید برق آبی در مناطق با بار شدید ممکن است با مشکلات جدی مواجه شود. علاوه بر این، توربینهای برق آبی با سرعت پایین کار میکنند و خرابی هایی به اندازه 0.5 هرتز ظاهر کنند. بنابراین تجزیه و تحلیل ارتعاشات واحد نیاز به سخت افزار نظارتی ویژه ای دارد که بتواند این فرکانس های بسیار پایین را تشخیص دهد.
همانطور که سلامت توربین آبی کاهش می یابد، عملکرد کاهش می یابد، تولید کاهش می یابد و خاموش شدن برنامه ریزی نشده امکان پذیر است. بهره برداری از این ماشین آلات نیازمند ملاحظات بار ویژه و تجهیزات نظارتی است که برای نیازهای منحصر به فرد آن طراحی شده است.

استفاده از سیستم های پایش وضعیت بر پارامترهای آنالیز ارتعاشات و فرآیند و سیستم های حفاظتی ماشین آلات در ماشین های دوار بزرگ مدت هاست که به عنوان یک ابزار ارزشمند در جلوگیری از خرابی قطعات و ماشین آلات شناخته شده است. چندین استاندارد بین المللی منحصراً برای ماشین آلات آبی ایجاد شده است. برخی از این استانداردها برای معرفی در اینجا خلاصه شده است:
EN 60994, GB/T 11348.5, GB/T 17189 .ISO 10816-6, ISO 7919-5 and ISO 10817
مطابق با استانداردهای ذکر شده، آکو پایش یک سیستم نظارت و حفاظت از شرایط خاص را توسعه داده است که برای توربین های آبی و ژنراتورها سفارشی شده است. علاوه بر الزامات ذکر شده در بالا، مجموعه کاملی از پارامترهای نظارتی مفید و عملکردهای نمایشگر اضافه شده است تا کارایی سیاست های تعمیر و نگهداری را افزایش دهد تا از سلامت مستمر دارایی های مولد برق و تشخیص زودهنگام مشکلات اساسی اطمینان حاصل شود. سیستم نظارت بر وضعیت، دادههای سلامت ماشینآلات را برای پردازش پارامترهای کنترلی یکپارچه میکند و به کاربر اجازه میدهد تا مشکلات را قبل از اینکه بر تولید برق تأثیر بگذارد، تصحیح کند.
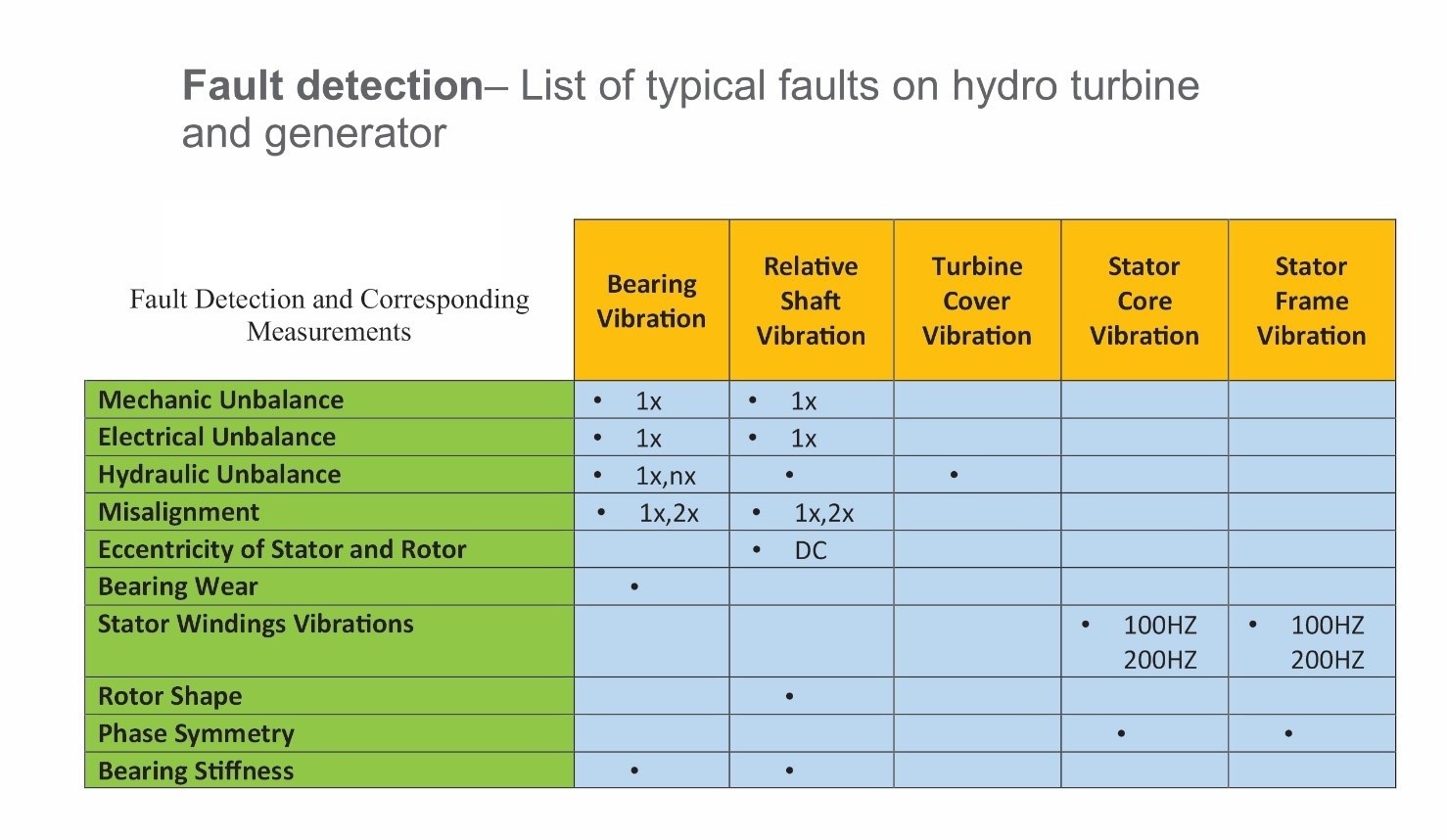
سه نوع اصلی از مشکلات واحد مولد توربین آبی وجود دارد که در بین اکثر آنها رایج است و به عنوان محتمل ترین عیب ها طبقه بندی می شود:
برای اندازهگیری هر یک از این خرابی ها، روش هایی برای مرتبط کردن هر یک از این مشکلات با حداقل یک اندازهگیری ایجاد شدهاند.
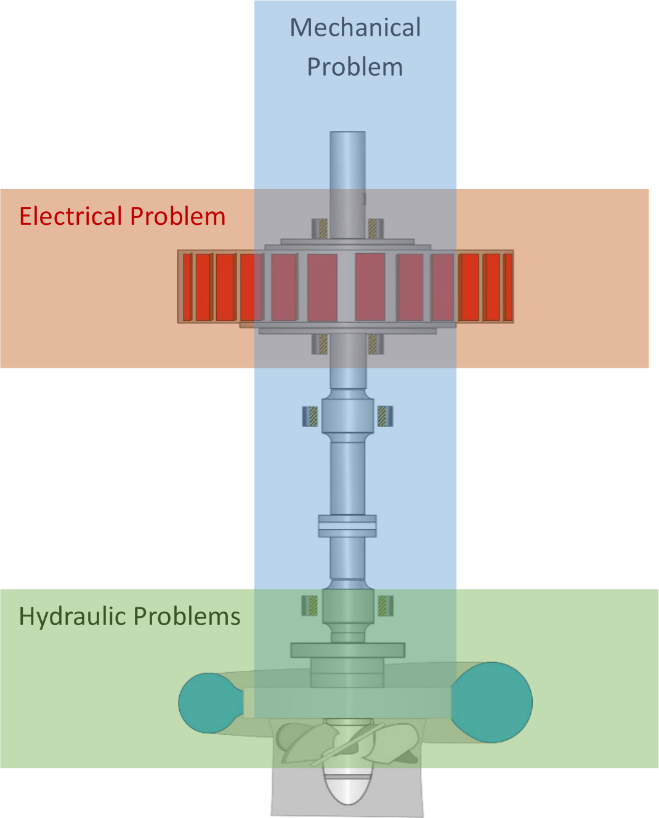
1- مشکلات الکتریکی که بیشتر رخ می دهد عبارتند از ارتعاش میله/سیم پیچ استاتور، خرابی عایق و مشکلات قطب روتور. این مشکلات بر اساس موارد زیر اندازه گیری می شوند:
2- مشکلات مکانیکی که بیشتر در واحدهای تولید برق رخ می دهد عبارتند از عدم بالانس دینامیکی، الاینمنت شفت، ارتعاش بالای بیرینگ، نوسانات بیش از حد کلرنس بلبرینگ و آب بندی و تغییر شکل استاتور و روتور. این خرابی ها با موارد زیر اندازه گیری می شوند:
3- مشکلات هیدرولیکی که بیشتر رخ می دهد ناپایداری جریان مانند کاویتاسیون و ناحیه بار ناهموار (Vortex) است و با موارد زیر اندازه گیری می شود:
با توجه به تفاوت های قابل توجه در طراحی و چیدمان، ماشین های هیدرولیک بر اساس سختی بیرینگ های شعاعی به چهار گروه اصلی تقسیم می شوند و به شرح زیر می باشند.
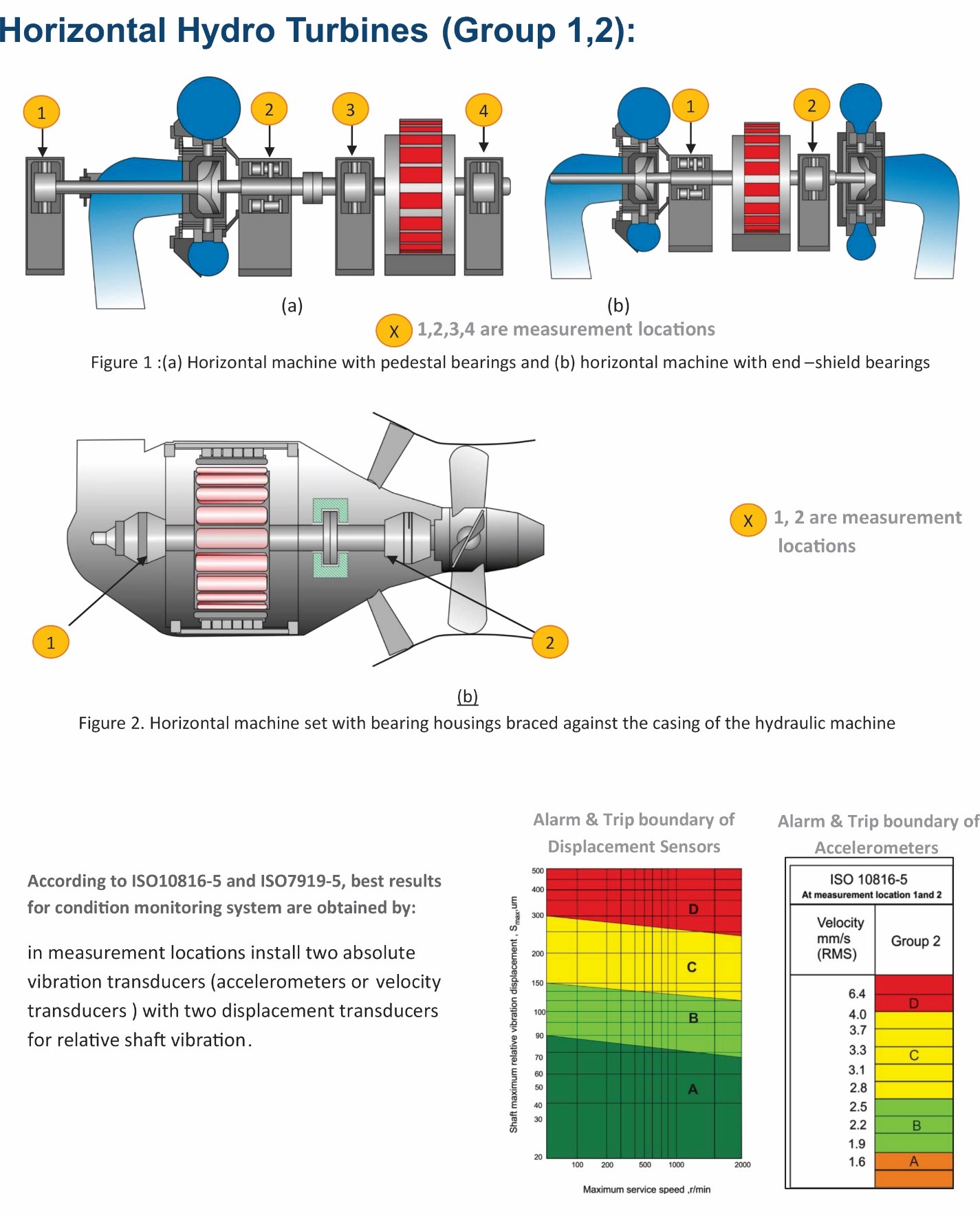
گروه 1: مجموعه ماشین های افقی با بیرینگ های پایه یا سپر انتهایی که بر روی پایه ای سفت و سخت نصب شده اند، معمولاً با سرعت های عملیاتی بالای 300 دور در دقیقه. شکل 1 (a,b)
گروه 2: مجموعه ماشین های افقی با محفظه های بیرینگ که فقط در برابر بدنه ماشین هیدرولیک مهار می شوند، معمولاً با سرعت های عملیاتی کمتر از 300 دور در دقیقه. (شکل 2)
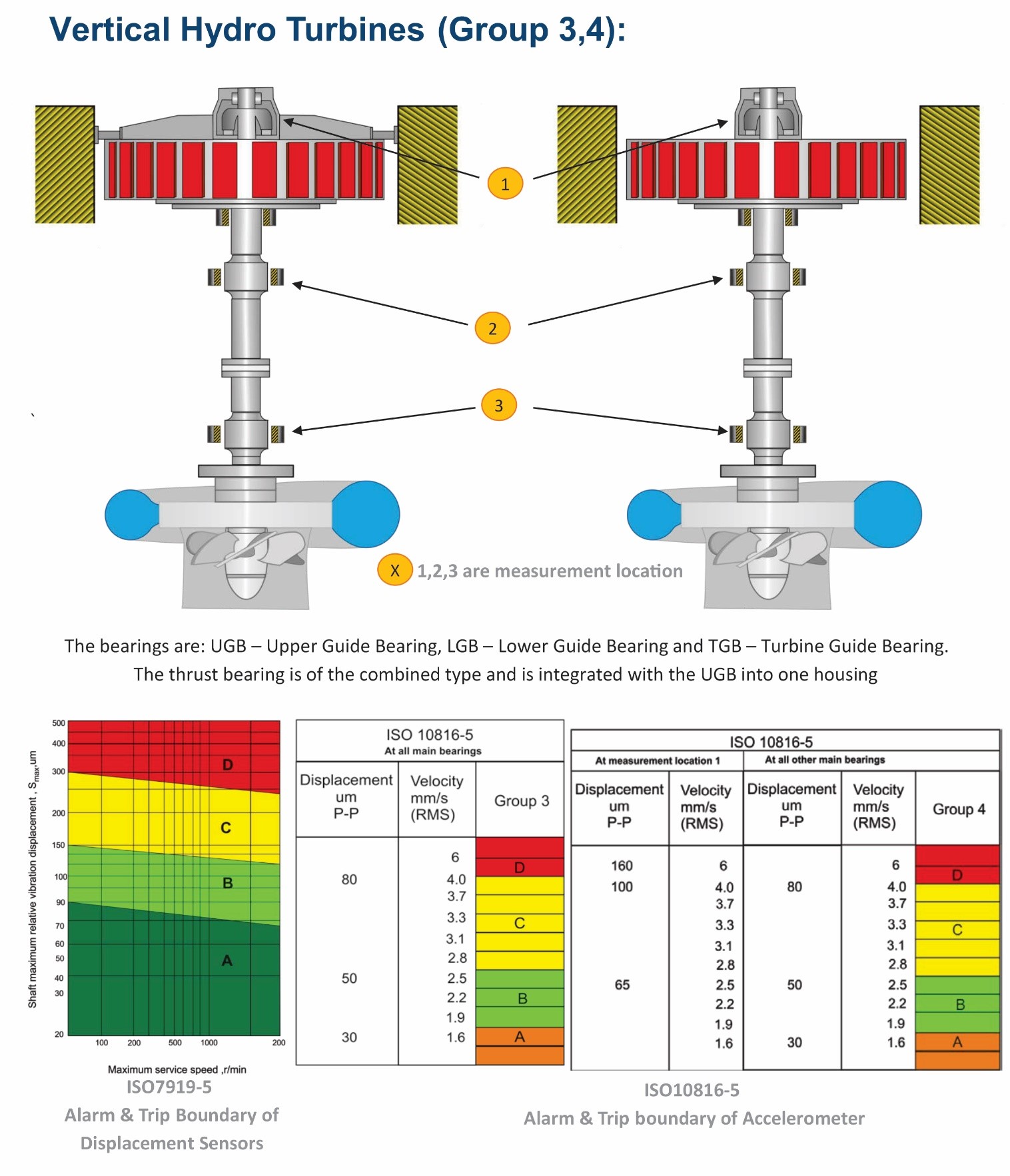
گروه 3: مجموعه ماشین های عمودی با محفظه های بیرینگ که همگی در مقابل فونداسیون مهاربندی شده اند، معمولاً با سرعت های عملیاتی بین 60 تا 1800 دور در دقیقه. (شکل 3)
گروه 4: مجموعه ماشین آلات عمودی با محفظه های بیرینگ پایینی که در برابر فونداسیون مهار شده اند و محفظه های بیرینگ بالایی که فقط در برابر استاتور ژنراتور مهار شده اند، معمولاً با سرعت های عملیاتی بین 60 تا 1000 دور در دقیقه. (شکل 4)
برای ماشینهای با سرعت پایین (زیر 300 دور در دقیقه)، کمیت اندازهگیری ترجیحی، جابجایی ارتعاش Sp-p (جابجایی اوج به پیک) است. اندازه گیری باند هم جابجایی و هم سرعت
برای ماشین های با سرعت متوسط و بالا (300 تا 1800 دور در دقیقه)، کمیت اندازه گیری ترجیحی، سرعت ارتعاش RMS است. انتظار میرود که طیف شامل اجزای فرکانس پایین باشد، ارزیابی معمولاً باید بر اساس اندازهگیریهای باند پهن سرعت و جابجایی باشد.
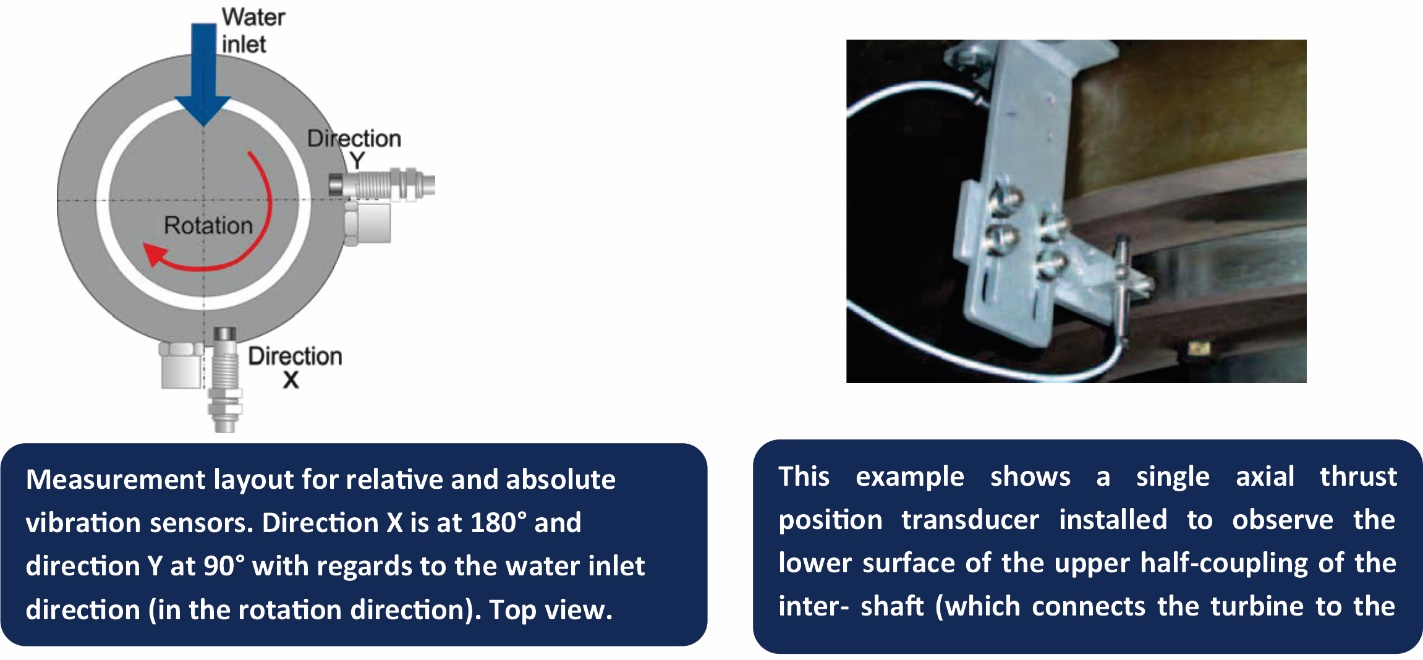
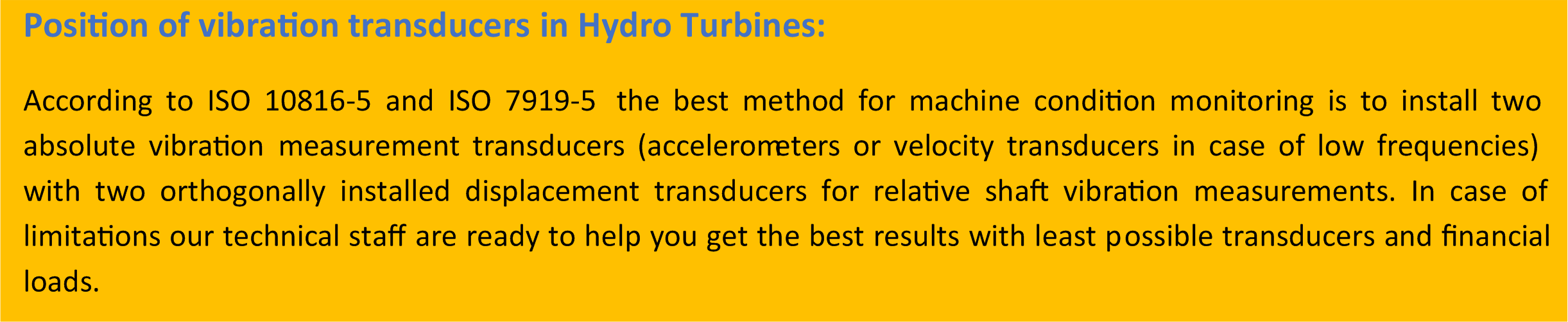
جهت هایی که سنسورهای جابجایی و شتاب در آن قرار گرفته اند در تصویر زیر نشان داده شده است.